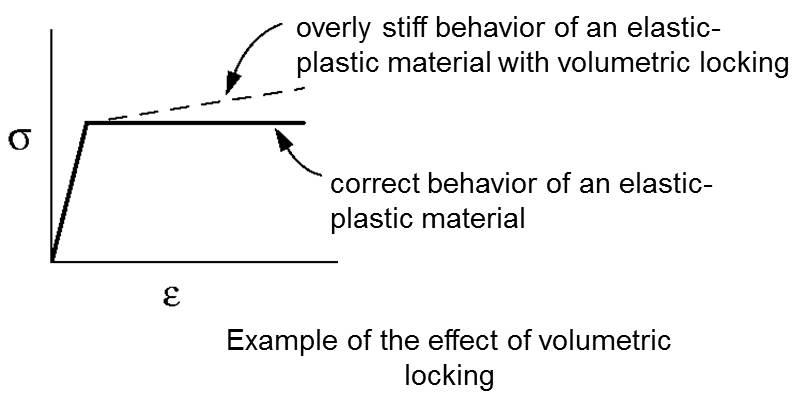
Volumetric Locking is exhibited by incompressible materials such as rubber having poisson’s ratio near or equal to 0.5 resulting in an overly stiff response. The overly stiff response is depicted in figure below.
The mathematical reason can be explained as below:
The stress can be divided into Deviatoric (distortional) and Volumetric (dilatational) components. The volumetric component is a function of bulk modulus and volumetric strain. If you have a look at the basic equations for bulk modulus, it can be observed that with poisson’s ratio as 0.5 the bulk modulus shoots to infinity resulting in overly stiff behavior. It has been observed that Fully Integrated Elements are prone to Volumetric Locking.
Stress = -pI + s;
where p=> Volumetric Component [Hydrostatic pressure]
s=> Deviatoric Component
p = -K * (Volumetric Strain);
K = E/ [3(1-2v)];
where K=> Bulk modulus
v=> Poisson’s ratio
Causes for Higher Tendency of Volumetric Locking in Fully Integrated Elements:
– At each integration point of the element the volume remains almost the constant and hence overconstraints the kinematically admissible displacement field.
– Consider an 8 noded 3D Hexahedral element. A Fully integrated element would have 8 integration points per element resulting in 8 constrains/element. But in this case only 3 d.o.f are available to satisfy these constraints.
– This results in overconstraining of mesh, also known as “Locking“
How to Avoid Volumetric Locking:
1] Use Reduced Integration: It has fewer volumetric constrains
2] Use of Selective Reduced Integration: It treats the volumetric and deviatoric parts pf stiffness matrix separately.
3] Use of B-Bar method: Similar to selective reduced integration. But instead of separating volume integral into two parts, the definition of strain is modified.
4] Use of Hybrid Elements: They work by including the hydrostatic stress distribution as an additional unknown variable, which must be computed at the same time as the displacement field. This allows the stiff terms to be removed from the system of finite element equations.
5] Reduced Integration with Hourglass Control: Artificial stiffness is added to the element which constrains the hourglass mode.